
About Me

Zirui Li, Ph.D.
Now, I am a postdoctoral research fellow in AutoMan Lab at NTU, which is led by Prof. Chen Lv. I successfully defensed my Ph.D. thesis on Interactive Motion Planning of Automated Vehicles based on Spatiotemporal Risk Continual Learning at Beijing Institute of Technology, Beijing, China, under the supervision of Prof. Jianwei Gong. Prior to this, I was a visiting researcher in TU Delft and TU Dresden from June, 2021 to June, 2024, working with Prof. Meng Wang, Prof. Victor Knoop.
- E-mail: zirui.li@ntu.edu.sg
- Google Scholar: Click here
- LinkedIn: Click here
Research Interests
My research interests include:
News
- Sep. 2025: My doctoral thesis is selected as the best Ph.D Thesis 2025 by SAE China.
- Sep. 2025: I join AutoMan Lab at NTU as Postdoc Research Fellow.
- Jul. 2025: I was recognised as Excellent Oral Presentation in the CASE Doctoral Student forum.
- Jun. 2025: One paper accepted by ITSC 2025, see you all in Golden Coast.
- May. 2025: I just successfully defensed my Ph.D. thesis.
- May. 2025: I was recognised as the IEEE ITSS Young Professionals Fellowship.
- Jan. 2025: I was selected for China Association for Science and Technology Youth Talent Support.
- Apr. 2025: Welcome to my homepage.
Biography
Education
Ph.D., Mechanical Engineering
Sep. 2019 - Jun. 2025
Beijing Institute of Technology (BIT), Beijing, China
Advisor: Prof. Jianwei Gong
Dissertation: Interactive Motion Planning of Automated Vehicles based on Spatiotemporal Risk Continual Learning
Awards: Excellent Doctoral Dissertation Seedling Fund
CSC Visiting Student
Jun. 2022 - Jun. 2023
TU Dresden, Germany
Advisor: Prof. Meng Wang
Topics: Interactive Behaviour modelling
CSC Visiting Student
Jun. 2021 - Jun. 2022
TU Delft, The Netherlands
Advisor: Prof. Meng Wang and Dr. Victor Knoop
Topics: Interactive Behaviour modelling
B.Eng., Xuteli Talent School (Mechanical Engineering)
Sep. 2015 - Jun. 2019
Beijing Institute of Technology (BIT), Beijing, China
Advisor: Prof. Jianwei Gong
Thesis: Analysis of influencing factors for driver decision-making at urban intersections
Awards: Outstanding Graduate and Outstanding Undergraduate Thesis
Work Experience
Postdoc Research Fellow
Sep. 2025 - Now
Nanyang Technological University, Singapore
Advisor: Prof. Chen Lyu
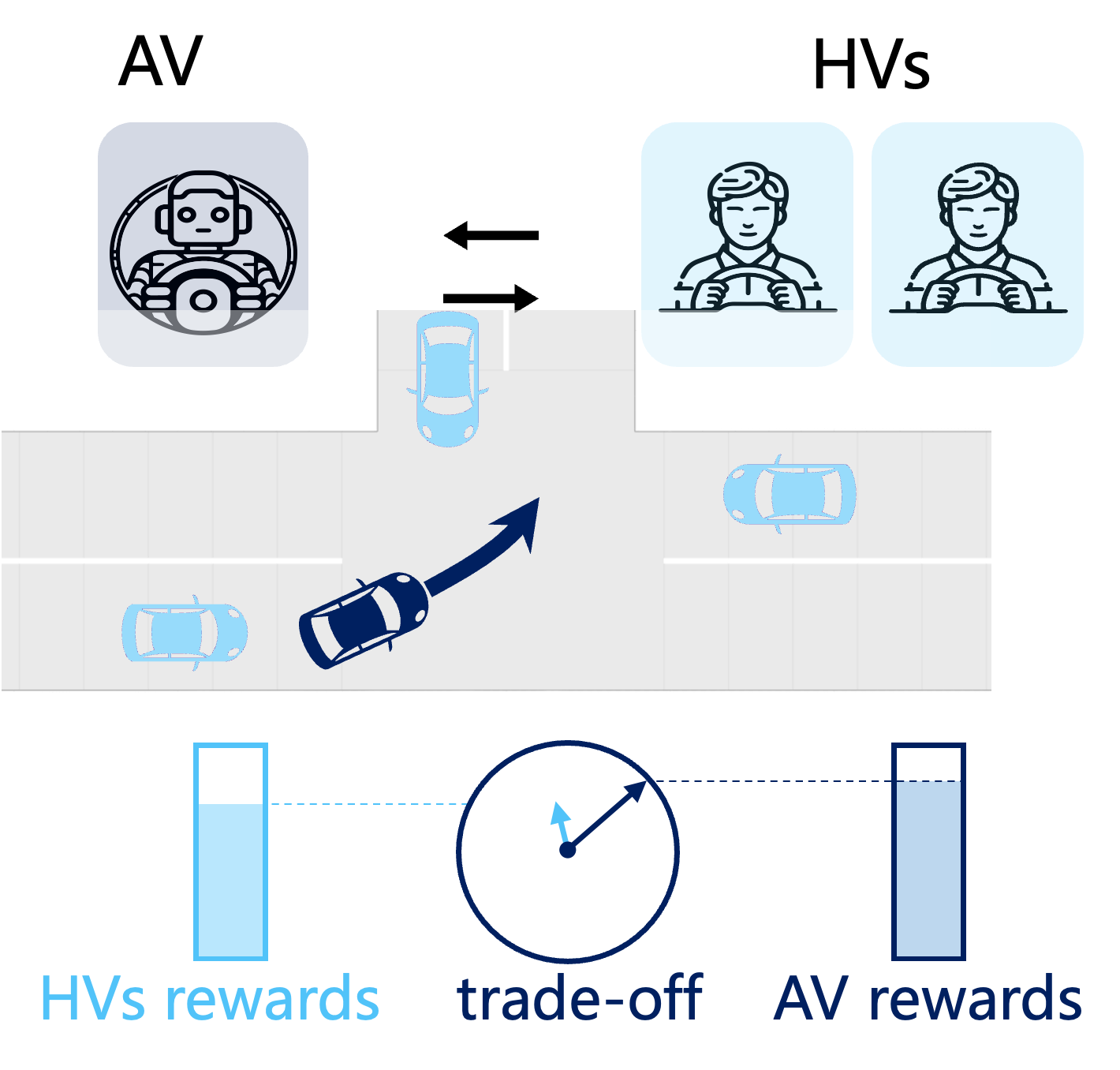
Topic: Collective AI
Part-time Researcher
Jun. 2023 - Jun. 2024
TU Dresden, Dresden, Germany
Advisor: Prof. Meng Wang
Topic: DNN-based Bus/tram arrival time prediction
Selected Research
Below are three selected interesting research I have done.
Interactive Motion Planning for Automated Vehicles
With the continuous advancements in information, sensing, and artificial intelligence technologies, unmanned vehicles as a new type of transport platform have made significant progress in fields such as autonomous delivery. This work focuses on modeling the interactive behaviors among multiple traffic participants, quantifying and integrating various types of risk, and designing motion planning algorithms. Accordingly, it proposes a spatiotemporal risk continual learning–based interactive motion planning method for unmanned vehicles. The “behavior prediction–risk assessment–motion planning” integrated approach aims to enhance driving safety in dynamically interactive environments through accurate spatiotemporal risk assessment.
Related Links:

Large-scale Driver Perceived Risk analysis with 140K+ ratings
Driver's perceived risk in self-driving cars can create the very danger that automation is meant to prevent: a frightened rider may hesitate when seconds matter, misjudge hazards, or disengage. However, how this risk evolves dynamically in real world remains poorly understood. Understanding what sparks that fear is therefore critical to real-world safety. We conducted the largest controlled investigation of passenger emotion in automated driving to date. 2,164 volunteers viewed short, high-fidelity videos of four common highway situations and provided 141,628 second-by-second safety ratings.
Related Links:
Public Transport Arrival Time Prediction
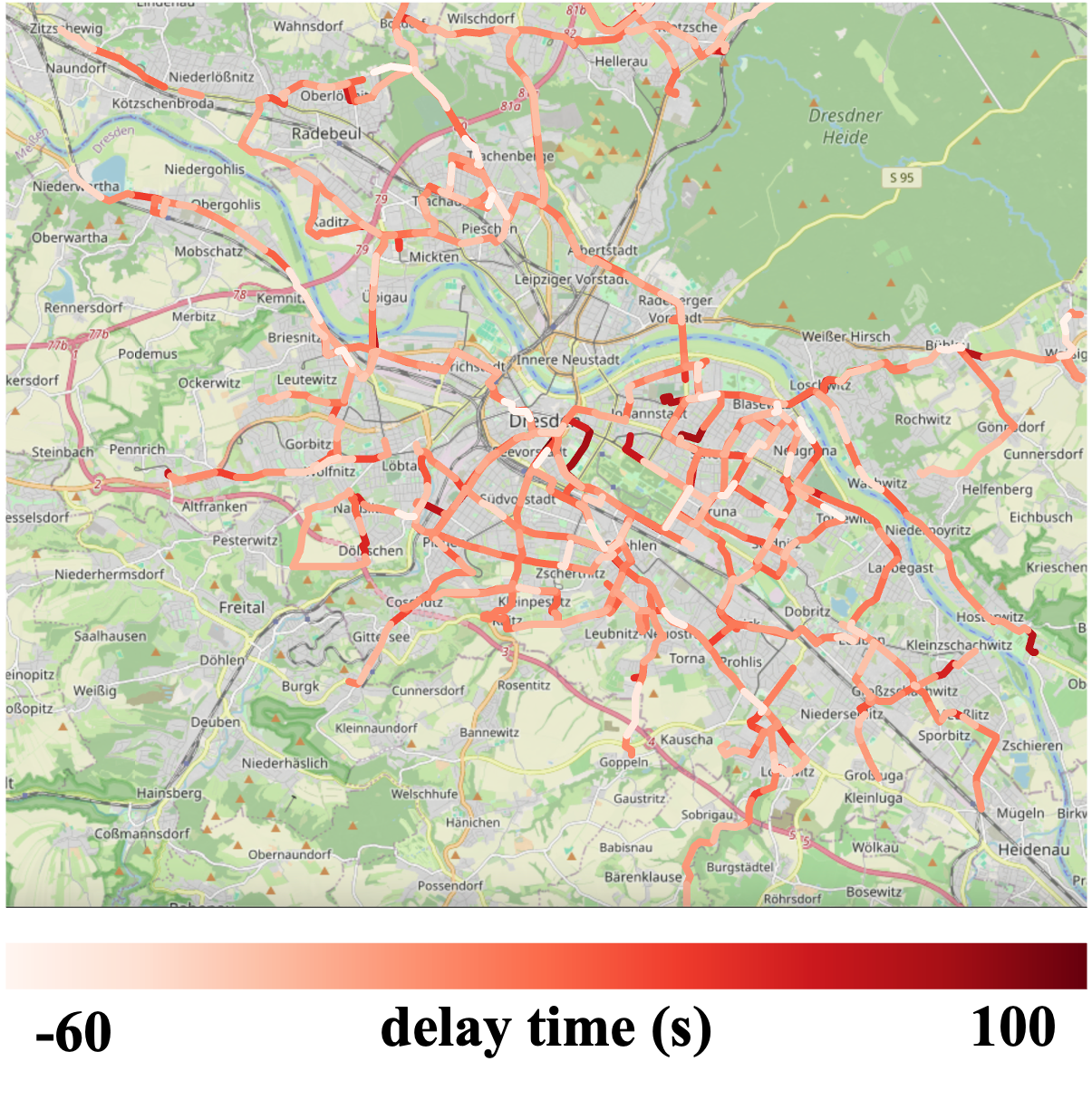
Accurate arrival time prediction (ATP) of buses and trams plays a crucial role in public transport operations. Current methods only focused on modeling the time series along the temporal dimension by investigating the point-to-point relationship between different timesteps. This strategy overlooked the latent periodic information within time series. Moreover, most studies developed algorithms for ATP based on a single or a few routes of public transport, which reduces their applicability in public transport management systems. To this end, this work proposes ArrivalNet, a two-dimensional temporal variation-based multi-step ATP for buses and trams. 125 days of public transport data from Dresden were collected for model training and validation.
Related Links:
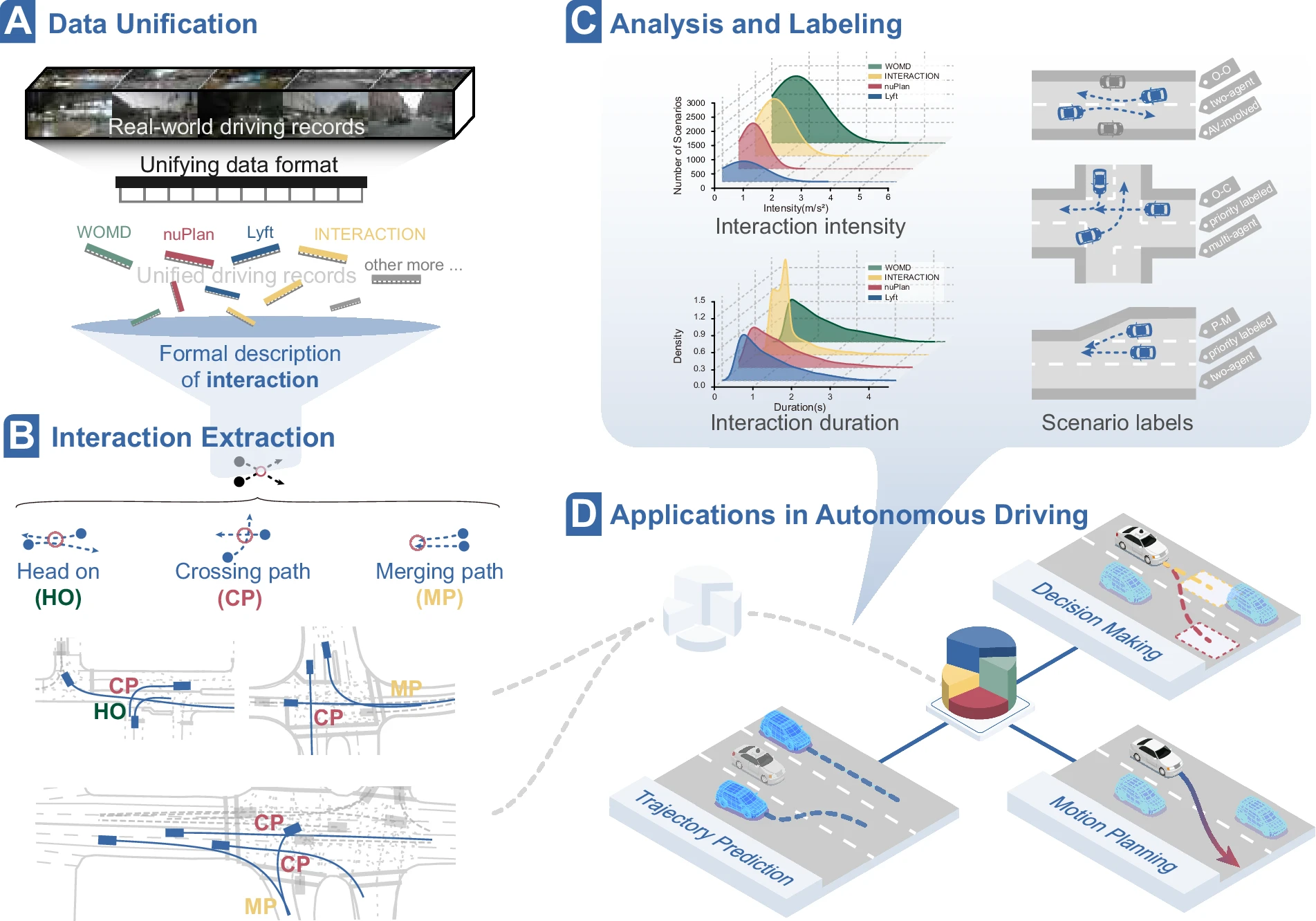
A naturalistic trajectory dataset with dense interaction
This work presents InterHub, a curated dataset of dense multi-agent interaction events, derived from large-scale naturalistic driving recordings. The dataset is accompanied by an open-source toolkit that enables users to expand InterHub by mining additional interaction events from both public and private driving data. By offering a unified taxonomy, rich annotations, and extensible tools, InterHub supports diverse research needs-from interaction behavior modeling to algorithm benchmarking-and promotes reproducibility, scalability, and cross-dataset comparison in autonomous driving studies.
Related Links:
Selected Publications
Preprints
Selected Journal Papers
Conference Papers
Books
Professional Services
Program Committee
- Working group leader, intelligent vehicle risk assessment working group under IEEE Standard Association
- Co-chair, Cooperative Decision-making for Connected and Automated Vehicles in ITS at IEEE ITSC 2023
- Associate Editor for IEEE IV 2023
- Chair, Social, interactive and safe behaviors for AVs: benchmarks, models and applications at IEEE IV 2023
- Organising committee and Proceedings editor, MFTS 2022
- Chair, Social and Interactive Behavior Modelling in ITS at IEEE ITSC 2021
Journal Reviewer
- IEEE Transactions on Intelligent Transportation Systems
- IEEE Transactions on Neural Networks and Learning Systems
- IEEE Transactions on Pattern Analysis and Machine Intelligence
- IEEE Transactions on Vehicular Technology
- IEEE Transaction on Transportation Electrification
- Accident Analysis & Prevention
- IEEE Robotics and Automation Letters
- IET Intelligent Transport Systems
- Frontiers of Information Technology & Electronic Engineering
- IEEE Transactions on Intelligent Vehicles
- IEEE/CAA Journal of Automatica Sinica
- IEEE Internet of Things Journal
- Transportation Research Part C: Emerging Technologies
- Transportation Research Part F: Traffic Psychology and Behaviour
Conference Reviewer
- IEEE Conference on Intelligent Transportation Systems (ITSC)
- IEEE Intelligent Vehicles Symposium (IVs)
- Transportation Research Board (TRB) Annual Meeting
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE International Conference on Robotics and Automation (ICRA)
Supervision
- Beijing Institute of Technology: Cheng Gong, Yunlong Lin, Chenxu Wen, Haowen Wang, Hailong Gong, Lianzhen Wei, Yangtian Yi, Xianqi He, Jingyi Xu, Yingqi Tan, Tairan Chen.
- TU Dresden: Fanyi Wei.